Motornet DC
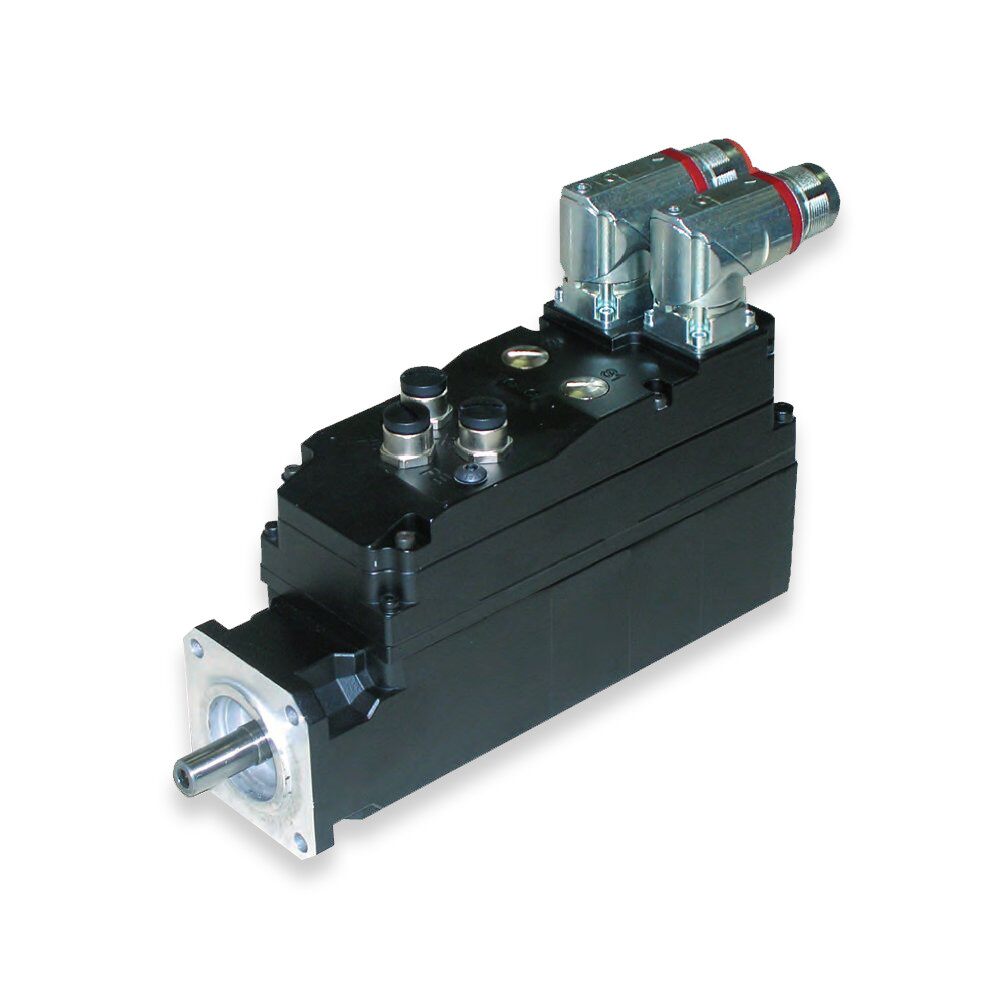
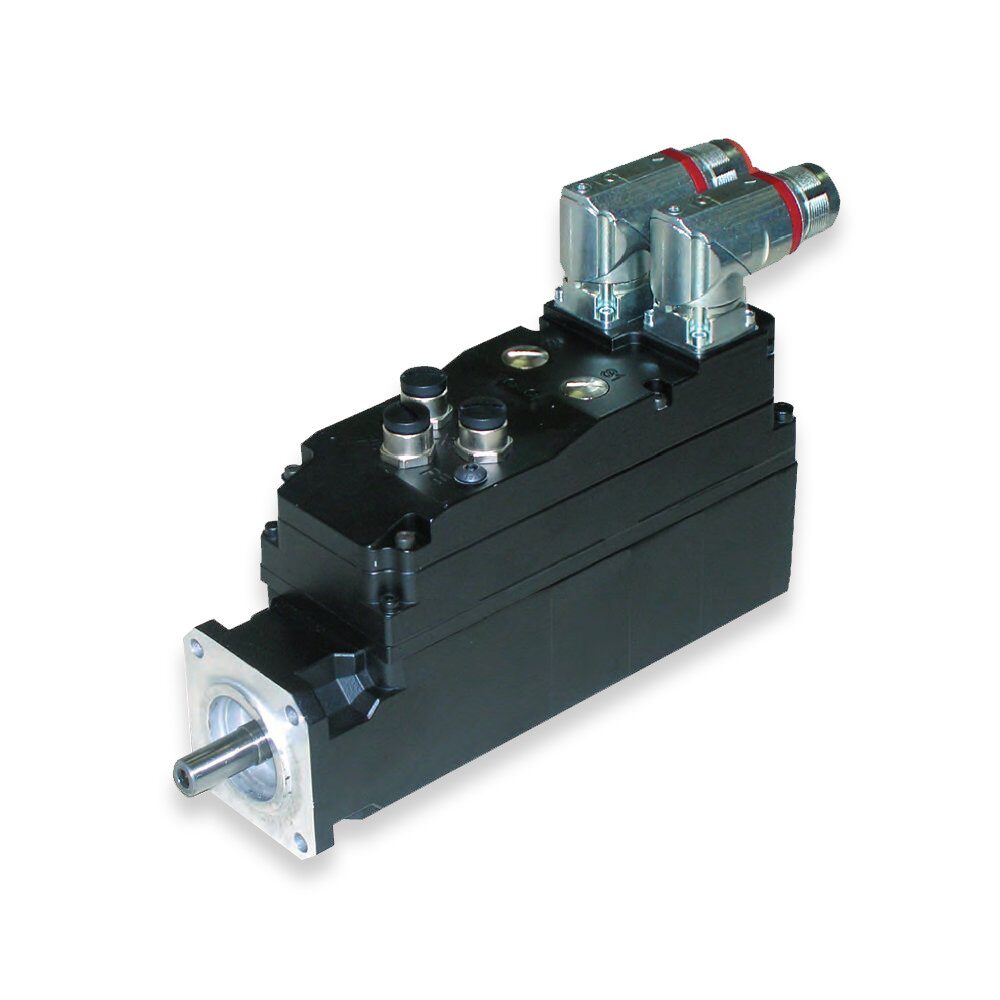
Available in 60-100mm frame sizes, Motornet DC servo motors have the Drive/Controller electronics integrated inside the motor - making them ideal for use in multi-axis decentralized applications where numerous motors are mounted on the machine.
Motornet DC is a brushless servomotor system with integrated electronics, supplied from a DC-bus voltage. Hybrid power, control and communications cables, a power supply and interface module complete the system, and local I/O's can be connected directly to the motor. Ideally suited to multi-axis applications where a number of motors are mounted in close proximity on the machine, Motornet DC allows a decentralized approach to motion control to be taken. Motion control functionality is executed by means of EtherCAT communication or optionally CANopen DS402 communication.
Features:
• Brushless Synchronous Servo Motor/Drives : available in 60, 70 and 100mm frame sizes
• Integrated Servo Drive/Controller Electronics : housed inside motor, controlled by EtherCAT
• Speeds up to 6000 min-1 / Continuous stall torques from 0.9 to 7.5Nm
• Power Output Rating : 1.2 - 8.3 kW (peak)
• PSU Input Supply : 3*230-480VAC
• Drive Input Supply : 325-680 VDC
• Feedback : Resolver
• Shaft End : Plain keyed shaft / Plain smooth shaft (option)
• Communication Options : EtherCAT / CANopen (option - under development)
• 2 Digital Inputs / 2 Digital Outputs (connected to motor)
• Safety Technology (STO)
• Protection level: IP64 / IP65 (optional)
• CE (EMC + LVD)
Application Areas:
• Packaging Machines
• Rotary Tables
• Filling, Bottling and Capping Machines
The next logical evolution in machine motion control, Motornet DC integrates servo control electronics into a brushless servomotor creating a self-contained motor and servo controller. This offers considerable benefits in terms of machine design by allowing a decentralised motion control architecture to be used. This in turn allows substancial savings in time and materials to be realised, while reducing machine footprints. Typical applications for Motornet DC include packaging machines and rotary tables where numerous motors are mounted on the machine.
Features and Benefits:
- Quick and simple machine configuration and reduced wiring:
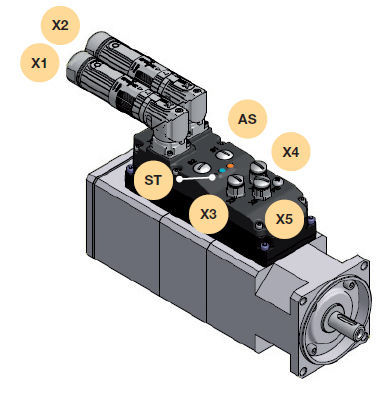
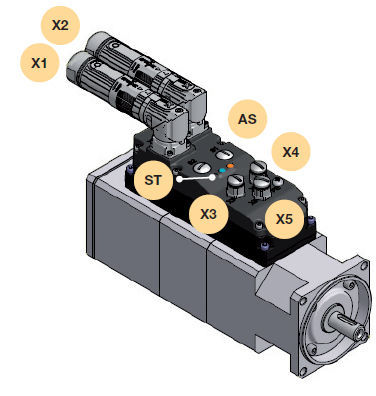
The hybrid cabling solution, which contains all power supply, control and communications signalling offers machine builders a number of benefits including:
• Simplified plug and socket connections at the motor
• Reduced number of connections and potential points of failure
• Reduced wiring time and cost of associated cabling
- Reduced Machine Footprint:
With a power supply and PSI Interface module being the only additional components required in the cabinet, the electronics footprint is up to 70 % smaller than traditional centralised solutions. Additionally, all wiring changes are made on the machine via plug and socket connections rather than in the electrical cabinet.
- Modular Machine Design:
Because of the modular nature of Motornet DC, machine design becomes very easy. Additional axes can be added with very little effort, simply by duplicating schematic drawings from other axes. This not only reduces engineering time and costs, but simplifies build and significantly improves time to market.
- Efficient Power Control:
Motornet DC works on a common DC bus power supply that allows the system to absorb and re-supply much of the braking energy to other Motornet DC units rather than dissipating it in the form of heat via external resistors. In some instances,resistors can be removed completely and in others smaller resistors are required.
| FRAME SIZE | 60mm
70mm 100mm |
| CONTINUOUS TORQUE (NM) | 0.9 - 7.5 |
| CONTINUOUS TORQUE (IN-LBS) | 8 - 66 |
| PEAK TORQUE (NM) | 4.0 - 26.7 |
| PEAK TORQUE (IN-LBS) | 35 - 236 |
| RATED SPEED (RPM) | 0 - 6000 |
| INPUT SUPPLY VOLTAGE | 230VAC
400-480VAC |
| FEEDBACK DEVICE | Resolver
EnDat Absolute Encoder (Multi-Turn) |
| PARKER DRIVE COMPATIBILITY | N/A (Motor with Integrated Drive electronics) |
| CERTIFICATES | CE (EMC + LVD) |
| IP RATING | IP64
IP65 (option) IP67 (option) |
| HOLDING BRAKE | Optional (under development) |
| COOLING METHOD | Air-Cooled / Natural Convection |
| SHAFT TYPE | Smooth
Keyway |
| COMMUNICATION INTERFACE | EtherCAT
CANopen (under development) |
| MODES OF CONTROL | Position Control (External Command)
Velocity Control (External Command) Torque Control (External Command) |